Toddlers (children 1-3 years old) learn primarily by interacting with their environment through crawling and/or walking. This independent mobility is accompanied by emotional, perceptual, cognitive and social development. But young children with disabilities such as spina bifida, cerebral palsy, and Down syndrome often demonstrate apathetic behavior, depressed motivation, a lack of curiosity and confidence due to associated mobility limitations. Providing powered independent mobility devices to children with mobility impairments may prevent these negative effects from developing, but powered wheelchairs are typically not prescribed to children younger than three years old. Consequently, this population is deprived of the developmental benefits associated with independent mobility.
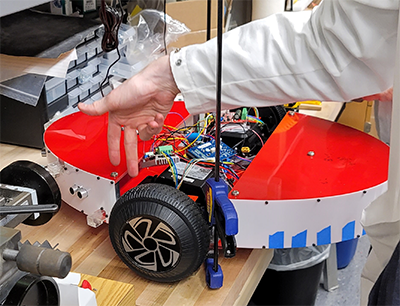
The M.Eng. Robotic Mobility Device for Toddlers team set out to improve upon a first-generation robotic prototype developed in Ithaca. The Weebot, designed by project sponsors and Assistance in Motion founders Dr. Sharon Stansfield and Dr. Carole Dennis of Ithaca College, allows children as young as six months to move about a room by shifting their weight atop the robot to interact with their environment.
While there were some challenges to device-building due to Covid-19 restrictions—the team could not access the original Weebot prototype, or demonstrate the new robot in person to sponsors—the team adapted tremendously well to work together over the 2020-21 academic year. They were able to work safely on campus in the BME Design Lab thanks to Cornell’s testing and COVID guidelines. They met daily through Zoom calls and collaborated with teaching faculty in biweekly meetings. By the end of the spring 2021 semester, the team finalized construction on the device with plans to undergo testing, and won first place in the end-of-year BME M.Eng. Showcase Autodesk Fusion 360 competition.
"It was rewarding to build this device and see the impact it would make for children with this need," said team member Denielle Smith. "Though it came with many learning curves, building this device taught me many lessons and strengthened my technical/engineering skills . . . [that] will be very helpful in my career. I can’t wait to see the children’s happy smiles as they have fun with the device we helped to build."
CAD model of the Infant Mobility Device prototype, c/o team member James Bennett.
"I learned so much from the hands-on experience of creating this device," said Caroline Waksmunski, an undergraduate who joined the team in spring 2021. "I’m grateful to have had the opportunity to work on the project and interact with our sponsors and advisers." Waksmunski will continue working on the device in the fall, expanding on customization and safety features.
Moving forward, Drs. Stansfield and Dennis are hoping to commercialize the device at low cost, so that most children who can benefit from the WeeBot will have access to it. "Dr. de Faria and his team definitely contributed toward bringing us closer to that reality with this project," said Stansfield. "It was also a pleasure to work with such a diverse team of engineers—as a woman who has worked in a STEM discipline for many, many years, I was happy to see this team of students represent the inclusion that I have always advocated."